ABOUT
Who I am
My name is Federico Osti, 23 years old from Italy. Robotics enthusiast since LEGO Mindstorms NXT came out.
STUDIES
Bachelor in mechatronics engineering at the University of Trento (Italy). Exchange semester at UMASS Lowel (USA). Currently studying Robotics Cognition Intelligence at the Technical University of Munich (Germany).
EXPERIENCE
Internship in the robotics department at CERN. Currently working at MVTec Software GmbH on deep learning based 6D pose estimation from single RGB image.
PROJECT
Metis
Metis is a delta robot developed entirely from scratch, serving as a stable platform
for testing and deploying machine vision algorithms.
In addition to its three degrees of freedom for positioning, it features an electromagnetic
gripper for handling metallic objects.
The software stack is built on the ROS 2 framework, with low-level motor control handled
via micro-ROS—a ROS port for microcontrollers.
Trajectory planning is based on quintic polynomial profiles for smooth motion, and inverse
kinematics are solved as an optimization problem using the Gauss-Newton algorithm.
Check out the YouTube channel for demo videos!
PROJECT
Metis 2
Metis 2 is a smaller, more compact robot, enhanced with an additional degree of freedom
along the vertical axis, enabling rotation of grasped objects.
Its software is fully developed at a low level for maximum efficiency, running on an STM32
microcontroller and structured as a large finite state machine.
Although promising, the project was soon set aside to pursue more exciting work in deep
learning for machine vision and deep reinforcement learning.
PROJECT (UNDER DEVELOPMENT)
itacaOS
Most of the effort, while developing embedded systems firmware, goes into the code
implementation of the code architecture.
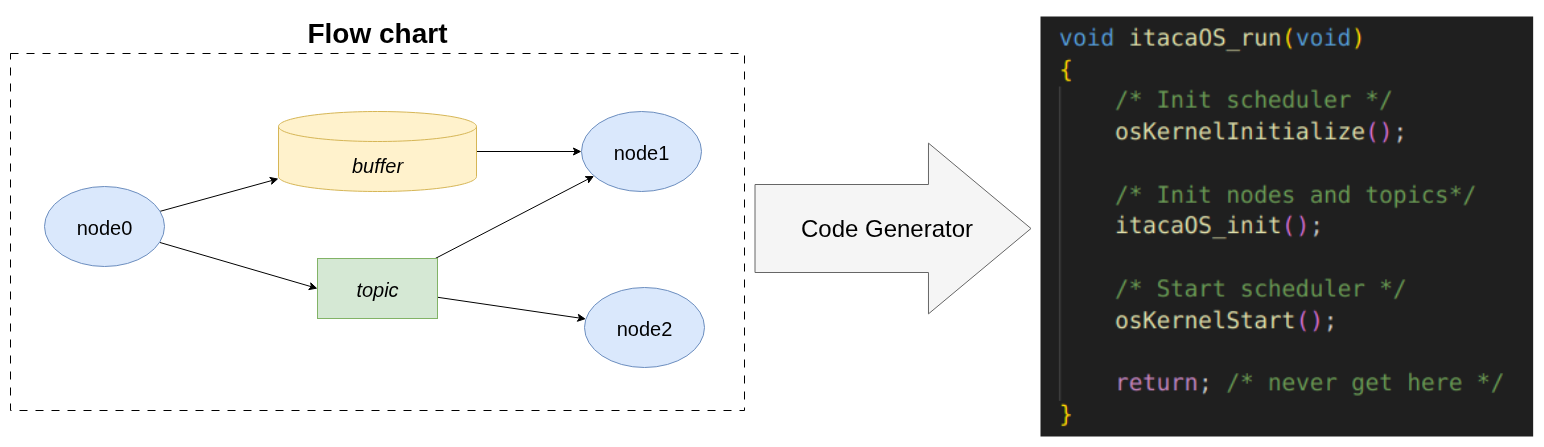
itacaOS is an automatic code generator that allows developers to focus on high-level
design instead of low-level implementation.
By converting a flowchart created in draw.io into a C-language project for STM32
microcontrollers, itacaOS reduces repetitive tasks and introduces a uniform code-style.
The generated code is built on CMSIS-RTOSv2, supporting stable RTOS kernels such as
FreeRTOS and Zephyr. It handles task scheduling, inter-process communication,
and memory queues, leaving developers to focus solely on implementing the core
logic within the generated function templates.